診断や治療に伴う患者の身体的負担を可能な限り少なくし,治療期間の短縮・患者の早期回復を目指した医療技術に,カテーテル手術があります.カテーテル手術には,医師の高度な手技が必要ですが,人体で練習はできず,動物による練習も倫理的な問題があります.本研究グループでは,カテーテルが血管を模した壁面に与える応力をリアルタイムで可視化できるカテーテル手術シミュレータを実現し,医師の手技向上や新しい医療機器の実現を目指しています.
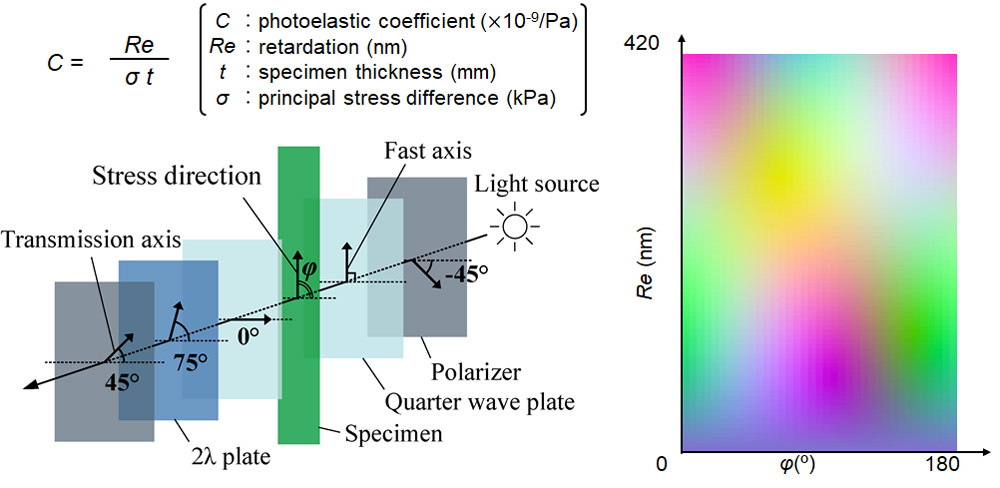
応力可視化の原理
外力を受けた弾性体に生じる干渉縞を利用して主応力差を計算する光弾性法を用います.本研究では,応力だけではなく,その方向も計測できる円偏向を用いた方法を使用してします.
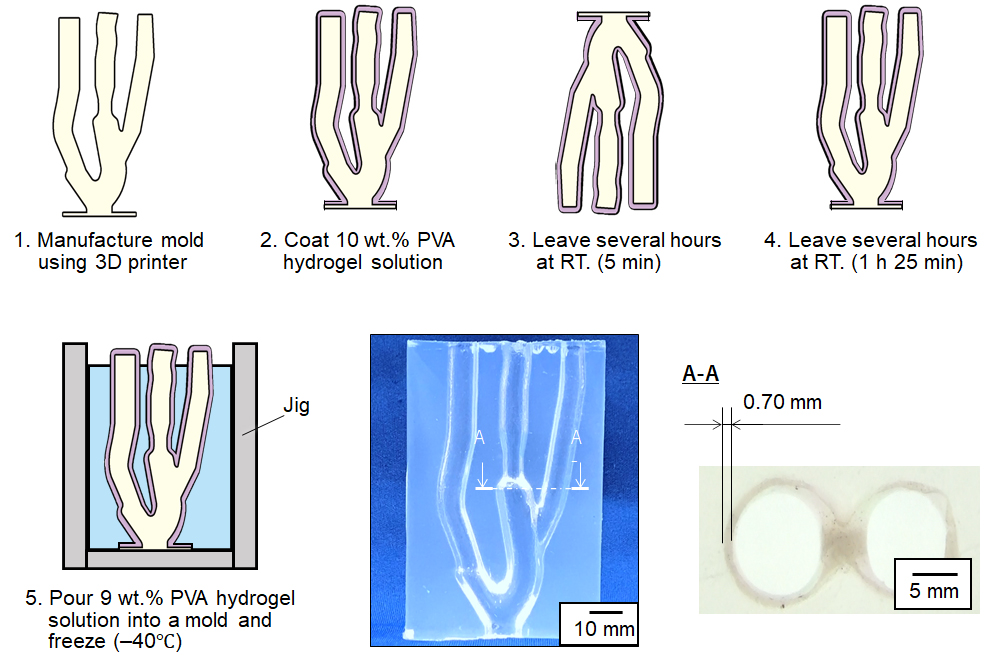
弾性を示すゲル材料とその三次元造形
光弾性法を用いて,カテーテルを挿入した際に血管を模したモデルにかかる応力を可視化するために,高弾性を示し,血管に機械的特性の違いゲル材料を用い血管を模した三次元形状を実現できる造形法を開発しました.